Research Projects
Surgical Robot
A hierarchical multi-sensor fusion master/slave control module, which consists of robot controller and navigation software. The control module provides a pre-operative surgical planning and intra-operative navigation interfaces for the operator, and a motion controller which calculates the optimal path, trajectory planning and servo controller for the robot. The overall robot system can achieve auto-tracking of the surgical tool and tremor suppression from the operator, thus provides very unique features of ease-of-use to the product.
Latest Article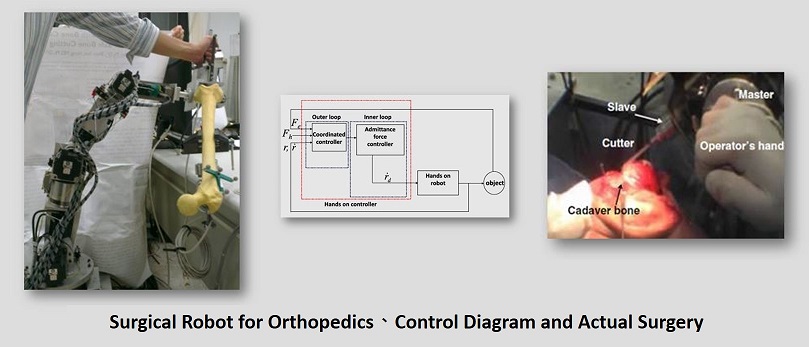
Development of Breast Cancer Diagnostic Device
When ultrasound imaging is used for breast cancer diagnosis, the lesion’s morphology is usually used to determine if the lesion is benign or malignant. Sometimes, the information provided by the procedure may not be adequate to make an accurate judgment. This paper presents an ultrasound accessory device designed to achieve this purpose. The device is easy to operate and is similar in use to a normal clinical breast ultrasound examination. A sonologist must only attach an ultrasound probe to the device and then slide it across the lesion maintaining a constant compression depth. The built-in inverse biomechanical model of the device will then calculate the predicted stiffness ratio of the lesion relative to its surrounding tissue based on the measured palpation data. Modelling and experiments have been performed on phantoms with embedded inclusions. The experimental results show that the stiffness ratio of the inclusion to its surrounding material can be accurately predicted by the handheld device. A preliminary clinical test was also performed to demonstrate the use of this device in vivo, to offer additional information to aid classification of the tumor as benign or malignant when complemented with ultrasound images.
Latest Article
Precise Mechatronic Control
This study is to design a novel 5-axis machine tool, which combines a RPS parallel kinematic mechanism (PKM) and an X-Y-Z stage to a gantry structure. In this design, the Z-axis of the X-Y-Z stage is used as a redundancy axis for the RPS PKM so that rotation ranges of the PKM can be significantly increased. A custom-made RRR-joint is also proposed to substitute the commonly used spherical joint in PKM so that the tilt angle of the spherical joint can be up to 90 degree. As a result a large work volume of the PKM can be accomplished even with a small and compact machine tool. In the thesis kinematic analysis and real implementation of the proposed redundant hybrid machine tool has been performed. Experimental results from machining a complex shape show that the proposed RRR joint and redundancy axis for the PKM can effectively enlarging the work volume.
Latest Article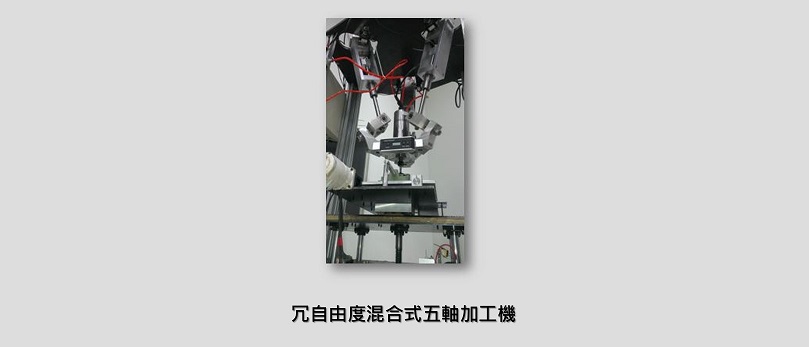
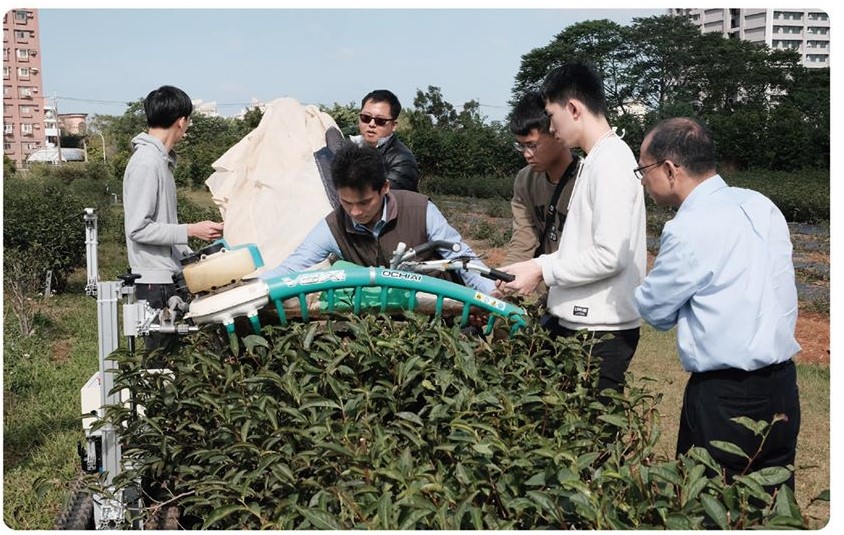
Agricultural Robot
Emphasize the function of man-machine coordination, make smart vehicles cooperate with harvesters for collaborative harvesting, focusing on the harvesting mode of single tea ceremony, This smart carrier can be used in unspecified tea gardens, which has greater flexibility in operation and solves the shortcomings of the current use of tea picking knives; In addition, through the sensor to detect the surrounding tea ceremony environment, path planning can make the robot and the operator walk at a certain distance to maintain the quality of tea harvest. And in accordance with the size of the tea growers' existing harvesting knives and the width of the tea trees in each tea garden, suitable turning methods can be performed, and it has the function of avoiding obstacles.